
Solar-powered flying platforms have yet to prove their real-world applicability outside of targeted demonstrations. Monitoring glaciers in polar regions is in pole position to become a primary application, as the midnight sun offers ideal conditions for perpetual flights. What better place than the Arctic for testing the new generation of solar-powered aircraft? The Autonomous Systems Laboratory (ASL) has developed a pioneering solar-powered unmanned aerial vehicle (UAV), AtlantikSolar, capable of flying for multiple days. Glaciologists from ETH Zurich – who use UAVs to monitor glaciers in Greenland – need further endurance to deal with the immensity of the glacial landscape. Continuous daylight conditions in the Arctic Summer provide potentially ideal conditions for a solar-powered plane, which would drastically extend the flight time of surveying UAVs.
Research paper on AtlantikSolar’s flight endurance world record published
Gallery
This gallery contains 4 photos.
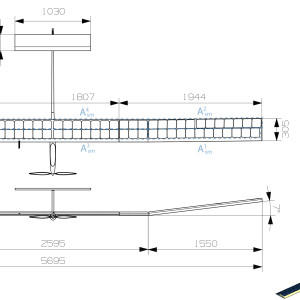
The research paper about AtlantikSolar’s flight endurance world record in the less-than-50kg aircraft class is finally available! It was published by the Journal of Field Robotics (JFR) and contains a wealth of background information about AtlantikSolar’s conceptual design, detailed design, … Continue reading
AtlantikSolar in Swiss AeroRevue 2016
AeroRevue, the official magazine of the Swiss Aero Club and one of the largest aerospace-related newspapers in Switzerland, has published a small article (in German) about our work and the AtlantikSolar-project. Check it out here or in AeroRevue print-magazine issue 12/2016-01/2017.
Tackling the European refugee crisis with solar-powered UAVs: A fully-autonomous 26-hour Search-and-Rescue flight.
Gallery

This gallery contains 12 photos.
One year after having demonstrated the 81-hour continuous solar-powered flight that is still the current world record in flight endurance for all aircrafts < 50kg total mass, the AtlantikSolar UAV has completed its next milestone by demonstrating the first-ever fully-autonomous … Continue reading
AtlantikSolar@Brazil: Challenging aerial inspection around a severe ship disaster
One of the prime applications that we are targeting with our solar-powered UAVs is to provide aerial support in large-scale disasters. From October 21st – 31st, in the Aventura AtlantikSolar@Brazil project, we had the chance to directly support our Brazilian partners through the first real-life (i.e. outside of research projects) disaster support mission with AtlantikSolar. Requested by SIPAM (Brazilian Amazon Protection System, part of the Brazilian Ministry of Defense), we were tasked to perform aerial sensing and mapping around the site of a disaster – a sunken ship that involved over 4400 dead cattle and 750t of oil spill – that had happened 2 weeks before.
ICARUS: Supporting maritime & land Search-and-Rescue missions from the air
In September, ASL’s fixed-wing team participated in the final land-based Search-and-Rescue demonstration of the EU-funded ICARUS project in Marche-en-Famenne, Belgium. Aerial robots, including ASL’s long-endurance AtlantikSolar UAV, where tasked to perform mapping and inspection missions in order to support ground robots and the Belgian B-FAST first response team in their relief efforts. Our UAVs stayed airborne for around 4 hours, all while providing live imagery of the disaster area to ground-based relief teams and the interested public. A video of the event is shown below, further information about the event can be found here.
Solar-powered 81-hours flight successful: A new endurance world record!
Gallery

This gallery contains 11 photos.
Two weeks after having demonstrated AtlantikSolar’s first 24-hour flight , the fixed-wing team of ETH Zurich’s Autonomous Systems Lab has reached another milestone: A continuous flight of its 6.8kg AtlantikSolar Unmanned Aerial Vehicle that spanned a total of 2338km and … Continue reading
First fully solar-powered day/night flight achieved: In-air 28 hours without fuel!
Gallery

This gallery contains 4 photos.
The AtlantikSolar Unmanned Aerial Vehicle took off on June 30th at 11:14 o’clock to attempt the “holy grail” of solar-powered flight: The crossing of a full day-night cycle on solar-power alone. More than 28 hours later, on July 1st at … Continue reading
Autonomous mapping – seen from the air
Impressions from an autonomous environment mapping mission using pre-computed paths with guaranteed coverage as performed by the AtlantikSolar UAV prototype on its test flight #24 in Rothenthurm, Switzerland.
New cooperation with Volz Servos
ETH Zurich’s Autonomous Systems Lab (ASL) is proud to present a new cooperating partner for the AtlantikSolar project: Volz Servos, a company leading in actuator manufacturing since 1983 that has been supplying actuators to a significant amount of high-value Unmanned Aerial Vehicle projects. Continue reading